NCHU Develops Self-Powered, Freely Deformable, Untethered Touch Sensor Matrix with Potential Applications in Robotic Skin
2024-03-01
興新聞張貼者
Unit秘書室
1,943
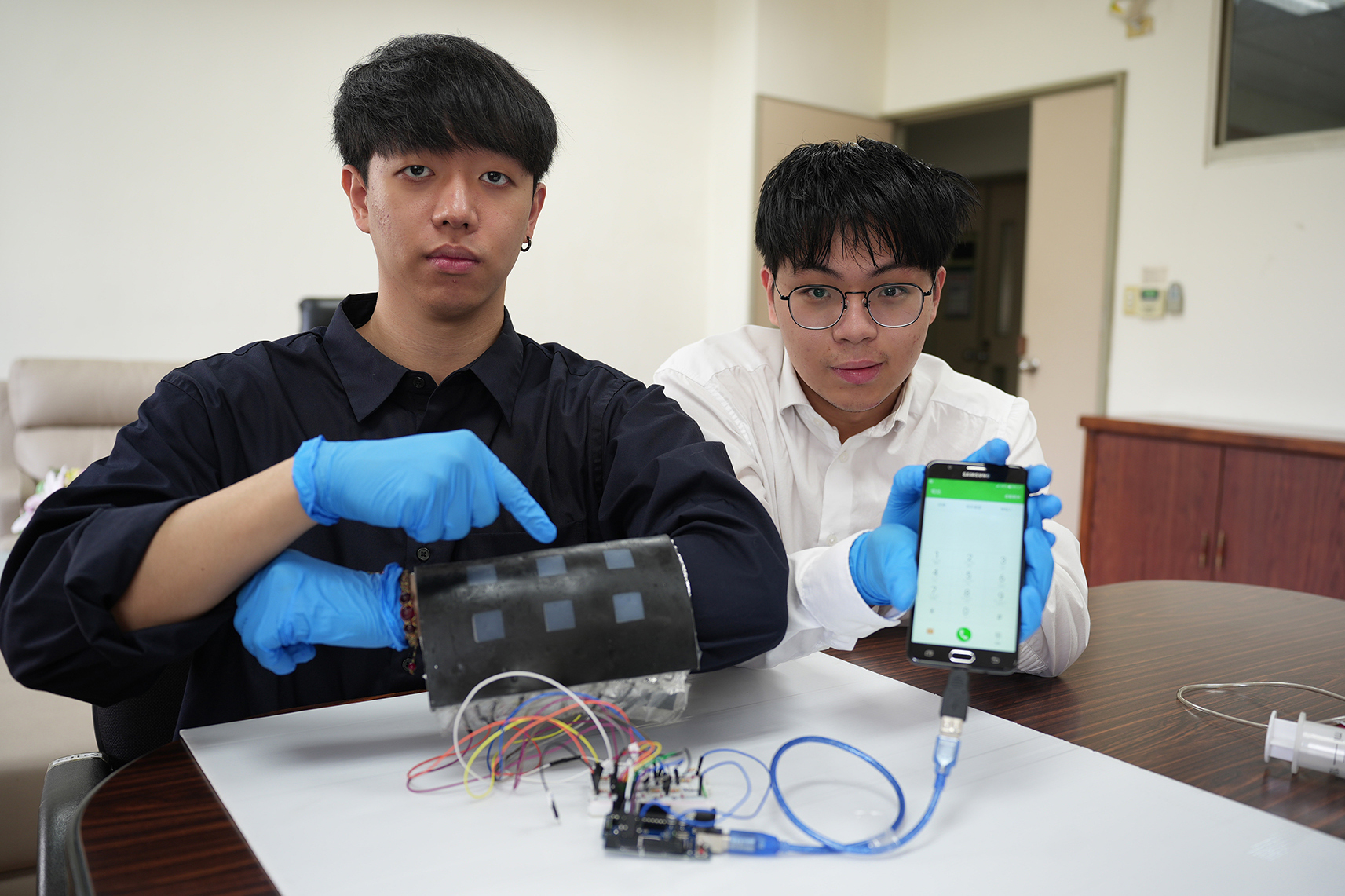
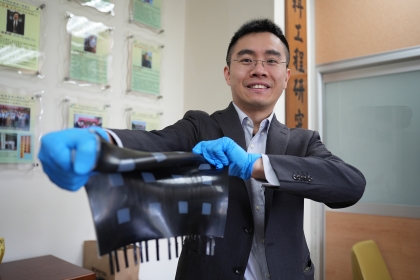
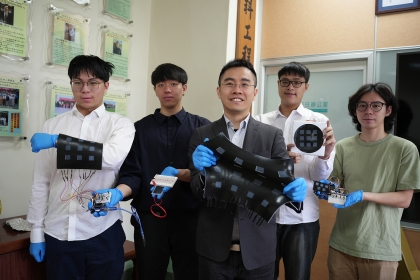
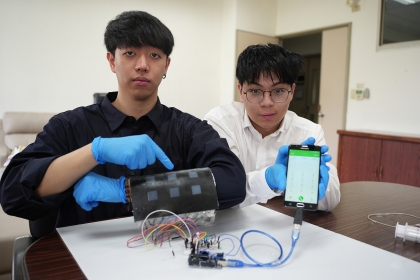
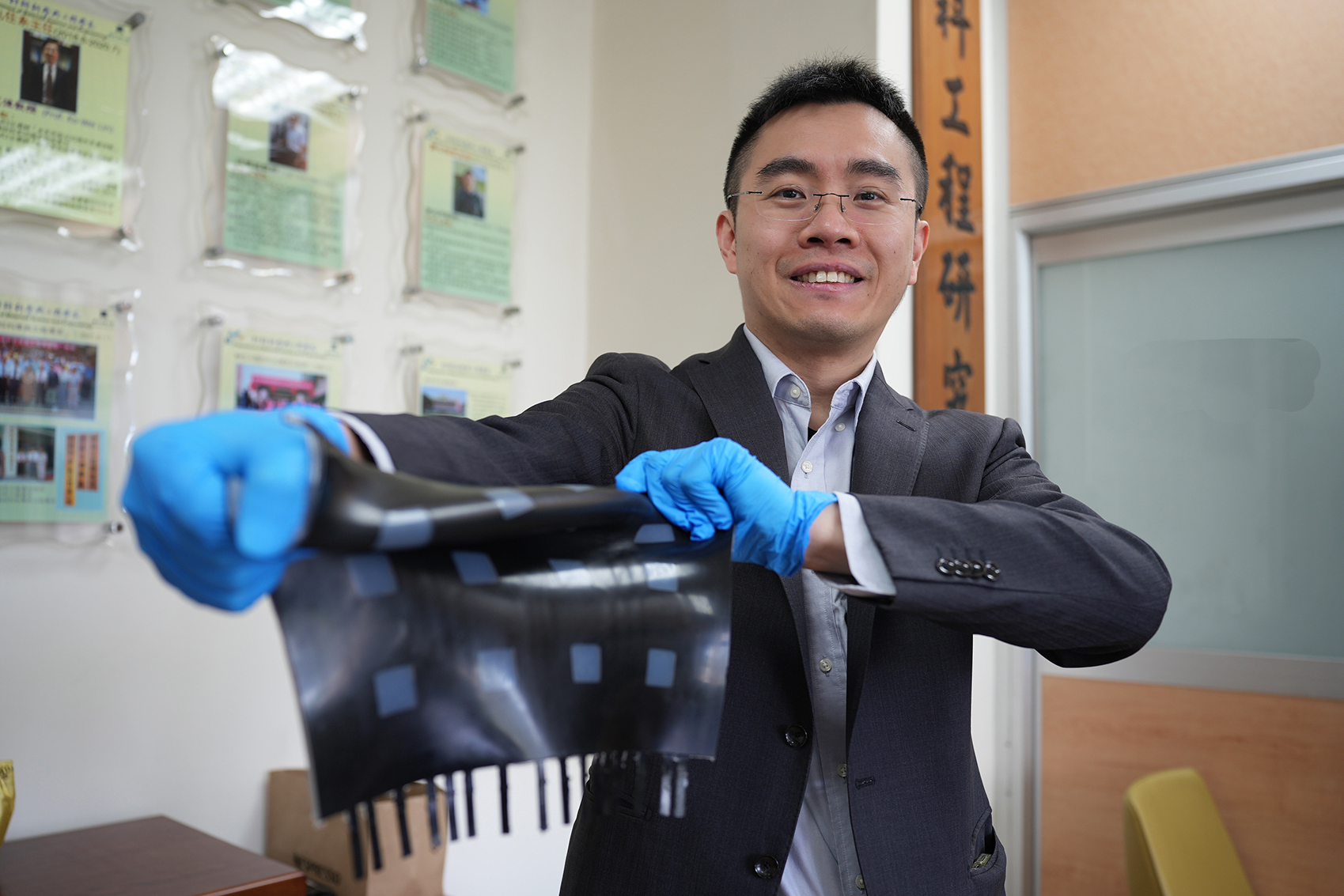
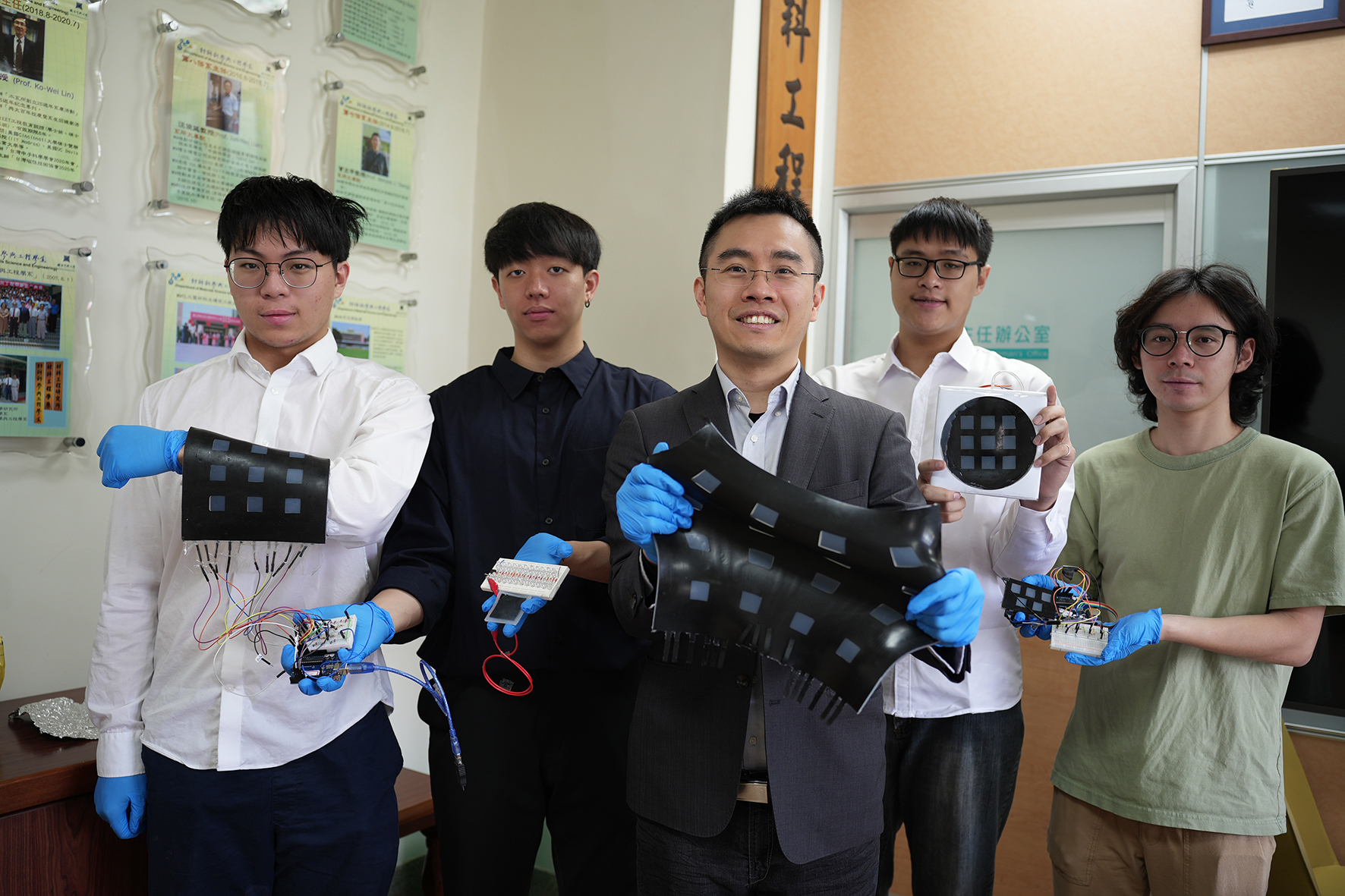
A research team led by Professor Ying-Chih Lai of National Chung Hsing University’s Department of Materials Science & Engineering has successfully developed a self-powered, untethered, and deformable touch sensor matrix that can be shaped to meet different application needs. The matrix shows great potential in the creation of robotic skin and for the further development of human-machine interfaces, interactive panels for metaverse applications, and prosthetic skin. The research outcomes were published in February in leading international journal Nature Communications.
Due to the rigidity, hardness, and non-scalability of current touch sensor materials technology such as that used in smartphone touchscreens, it is very difficult to endow robots with tactile perception, much less create a robot with tissue that can stretch and flex with its movements. Furthermore, since traditional touch panels are battery-powered, the energy-intensive nature of tactile, large-area robotic skin application is also a major challenge.
According to Lai, the deformable, self-powered touch sensor matrix was developed using nanogenerator technology operating on the principle of natural static electricity. Since static electricity exists in natural and many kinds of materials, the team was able integrate it into the flexible material to create the untethered touch sensor matrix.
This invention’s most significant breakthrough is its multichannel shielding technology that can attenuate interference from wiring and circuitry, thus allowing for large-area, multi-point touch sensor matrices. The technology has already proven effective in applications involving interactive tactile panels, robotic skin, smart insoles, deformable keyboards, and other human-machine interfaces, and shows potential for a broad range of future applications.
After conducting research with teams in the US and Europe that resulted in exceptional research outcomes, Professor Lai joined NCHU in 2016 and has since succeeded in developing self-healing robotic skin and soft robots. He has also published 27 papers in multiple major international technology journals, each with an impact factor exceeding 15, thereby demonstrating research and publication capacity and achievements that are on par with researchers at the leading international universities.
Journal website: https://www.nature.com/articles/s41467-024-45611-6
Due to the rigidity, hardness, and non-scalability of current touch sensor materials technology such as that used in smartphone touchscreens, it is very difficult to endow robots with tactile perception, much less create a robot with tissue that can stretch and flex with its movements. Furthermore, since traditional touch panels are battery-powered, the energy-intensive nature of tactile, large-area robotic skin application is also a major challenge.
According to Lai, the deformable, self-powered touch sensor matrix was developed using nanogenerator technology operating on the principle of natural static electricity. Since static electricity exists in natural and many kinds of materials, the team was able integrate it into the flexible material to create the untethered touch sensor matrix.
This invention’s most significant breakthrough is its multichannel shielding technology that can attenuate interference from wiring and circuitry, thus allowing for large-area, multi-point touch sensor matrices. The technology has already proven effective in applications involving interactive tactile panels, robotic skin, smart insoles, deformable keyboards, and other human-machine interfaces, and shows potential for a broad range of future applications.
After conducting research with teams in the US and Europe that resulted in exceptional research outcomes, Professor Lai joined NCHU in 2016 and has since succeeded in developing self-healing robotic skin and soft robots. He has also published 27 papers in multiple major international technology journals, each with an impact factor exceeding 15, thereby demonstrating research and publication capacity and achievements that are on par with researchers at the leading international universities.
Journal website: https://www.nature.com/articles/s41467-024-45611-6
NCHU Develops Self-Powered, Freely Deformable, Untethered Touch Sensor Matrix with Potential Applications in Robotic Skin
NCHU Develops Self-Powered, Freely Deformable, Untethered Touch Sensor Matrix with Potential Applications in Robotic Skin