【媒體報導】師承王中林、鮑哲南,這位青年科學家打造自發電的軟機器人
更新時間:2019-03-19 13:47:23 /
張貼時間:2019-03-19 13:30:14
興新聞張貼者
單位秘書室
新聞來源MIT 科技評論
2,993
稿源:2019-3-18/MIT 科技評論
青年學者賴盈至在過去 6 年,先後以訪問研究生的身份進入斯坦福大學、佐治亞理工學院,分別師承了美國佐治亞理工學院教授、中國科學院外籍院士王中林及斯坦福大學化學工程學院院長鮑哲南,在兩位科學家的指導下跨入柔性電子與摩擦納米發電機(TENG,triboelectric nanogenerator)的研究領域。並將兩位材料領域學者的研究領域進行了更深度的融合創新,進而開發出全球第一個具有自驅動(self powered)、主動感知的軟機器人(soft robot)。
多年來在人造皮膚領域帶領開創性研究的鮑哲南教授在有次採訪中提到,如果以人的皮膚作為一個啟發點出發,或許就能夠開創出更高的創造力,而不是局限于現有電子器件的功能去思考,會從生物類比的方式思考不同的可能性,進而產生一些平常想不到的做法。而賴盈至在接受 DeepTech 採訪時也特別提到,“兩位老師幫助我打開了傳統的思維。”
基於上述“如果打破傳統的框架,就有很多機會冒出來”的理念,以及在王中林院士的帶領下,賴盈至等人利用摩擦納米發電機,開發出全球第一個自驅動,且可主動式感知、響應外部刺激和內部運動的軟機器人皮膚,實現自發電,不用電池就可感測觸摸、壓力、濕度,讓軟機器人的能力和應用範圍,又往前邁了一步。
該研究成果《Actively Perceiving and Responsive Soft Robots Enabled by Self-Powered, Highly Extensible, and Highly Sensitive Triboelectric Proximity- and Pressure-Sensing Skins》先前已經發表在國際期刊 Advanced Materials 上。
此次,DeepTech 專訪了這位青年科學家、“臺灣中興大學”材料科學與工程學系助理教授賴盈至,探討自驅動電子皮膚的優勢,以及後續可持續改善的方向。
軟機器人的挑戰:大驅動電壓、高功耗
人類通過攝像頭、傳聲器賦予了機器人視覺、聽覺,近年隨著機器學習相關演算法的躍進,這兩大領域已經有很大的進展及市場應用,機器人“觸覺”則是許多科學家也想攻克的領域。在生物體中,皮膚是最大的器官,不僅具表面保護作用,還有優異的機械屬性,如柔韌性、伸展性和順應性,可以主動感知環境資訊,包括觸覺、壓力、濕度等。全球許多研究團隊投入開發類似皮膚的感官設備—電子皮膚,讓機器能夠更自然感受人和環境,並與其互動。
提到軟機器人,大家最耳熟能詳的例子莫過於迪士尼動畫裡的“大白”,與剛性材料相比,由柔順和可伸展材料製成的軟機器人可提供更安全的應用,同時可變形的體態和類似肌肉的動作也較能適應不可預測的環境,運動的自由性相對較大,如果軟機器人又具有了觸覺,便進一步擴大了應用範圍。
不過,要開發能夠在軟機器人上工作的類皮膚感測器(skin-like sensor)難度很高,包括材質的拉伸性、靈敏度,以及需要大的驅動電壓,一般來說,柔性無源感測器,如電阻/電容/光學類型,需要連續預先設置大型驅動電壓,通常為 1~10 V 或是由光信號驅動它們運行。
此外,傳統感測器是通過電力進行驅動,機器人的體積通常不小,如果要在機器人身上大面積覆蓋電子皮膚,每個感測器驅動電壓,就會導致功率耗散高,再加上,現有的電子元件不適用於彎彎曲曲、體態變動的構造之上,因此,開發用於軟機器人的關鍵感應裝置,就必須找到其他技術來規避傳統感測器的限制,摩擦發電就成了一帖解藥。
摩擦起電效應(triboelectric effect)為一種自然現象,利用材料不同的電負性,當材料在與另一種材料接觸後,變為帶電的,在電介質表面上的摩擦電荷,通過驅動自由電子在外部電路的流動,進而產生電勢(electric potential)。與無源感測器相比,摩擦皮膚的驅動能量來自摩擦起電效應,涉及接觸電氣化和靜電感應的協作。
賴盈至表示,摩擦發電有兩種應用方法,一種是發電源來自機械力,像是用手觸摸、用手施加壓力;另一種則是自然源,利用風、雨產生能量。
應用在電子皮膚上,當你觸摸它時,會產生一個電力信號,但除了用作發電之外,他們研究的創新之處,在於將電力信號變為一個信號源,摩擦納米發電機就變成了感測器,這個可自供電的摩擦皮膚(tribo-skin)能夠感知外部刺激,像是碰觸和壓力,又具備很好的拉伸性,就算被剪破也能正常運作,同時實現了機器皮膚和軟機器人於一身。
自供電感測器三大優點
摩擦發電感測器跟傳統感測器有什麼不同?賴盈至舉例,智慧手機要有觸控功能,必須先提供觸控面板模組電力,用戶觸摸後,原本的電力信號就會改變,系統就會知道有人觸摸了它,但是使用 TENG 技術的感測器不需要事先提供電力,它自已會產生電力信號,也就是,一個可自供電的感測器。
試想一下,若要賦予機器人觸覺,必須在全身或四肢鋪滿感測器,會使機器人更加耗電,因此,摩擦發電感測器的第一個優點是解決了供電問題。
另一個好處在於材料選擇及形體運用靈活,TENG 感測器可以使用多種材料來製作,包括橡膠、矽膠、高分子、薄膜等,可以依照材料的特性做出可彎曲、可伸縮的型態,材料不受限,可應用性就寬廣很多。
第三個優勢在於成本,賴盈至指出,TENG 感測器不需使用半導體製程如熱蒸鍍金屬,而是採用低溫製程,成本會比傳統的感測器便宜許多。
電子皮膚被剪破仍正常運作,觸診、摸尿布、爬行機器人都可行
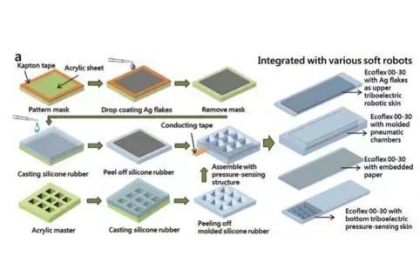
根據發表在 Advanced Materials 上的論文,他們開發的摩擦皮膚將導電基質夾在彈性體(elastomers)之間,均勻鋪覆在三角微棱鏡(triangular-microprism)壓感結構上,有很好的拉伸性(100% 拉伸應變性能),靈敏度也很高,低壓敏感度為 0.29 kPa-1(9.54 V kPa-1,<5 kPa),並且最高檢測限可達至 63 Pa。
具有最高電子親和力的橡膠是很好的摩擦電負性材料。當物體與摩擦皮膚接觸時,由於電負性的差異,電子從物體表面移動到橡膠表面。當物體離開時,兩個帶相反電荷的表面分離,產生電位差。橡膠表面上的未遮罩負電荷驅動自由電子從嵌入的銀片流到地面,並引起電極中正電荷的累積,從而產生電流和電壓輸出。
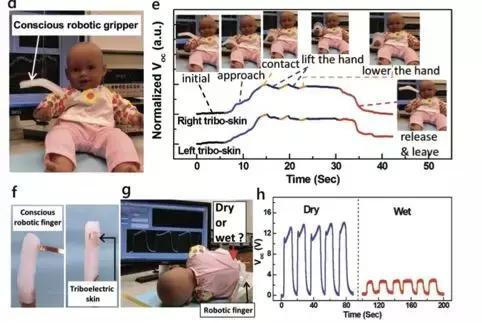
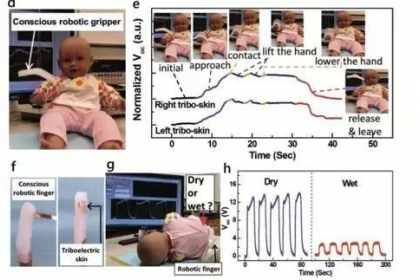
摩擦皮膚可以整體集成到軟氣動致動器(pneumatic actuator)中,使軟機器人能夠執行各種主動感知和回應任務,像是機器抓手,可以感知物體的移動,例如距離物體多近,也能夠控制舉起、放下、或是抓取的力道,並意識到貨物掉落,可以應用在工業機器人中的監視和回饋控制上。
另外,也能應用在機器手指上,感知溫濕度、檢測到細微的人類生理信號,例如他們就設計了一個機器人手指用以檢測嬰兒褲子的水分。或是與毛蟲類機器人、蛇型機器人結合,將摩擦皮膚嵌入到機器人的腹部,當機器人在爬行時,就可感知其肌肉運動,可以執行特殊任務。
該軟機器人可直接驅動光電元件,通過點亮 LED 燈做出反應,也可以進一步做成用聲音、光線、短語等方式來應答人類,讓人類與機器人之間的交互更直觀。
摩擦納米發電機又一新研究:能量收集雨衣
除了上述的軟機器人研究,不久前國際期刊 Advanced Science 刊載一篇文章《Waterproof-Fabric-Based Multifunctional Triboelectric Nanogenerator for Universally Harvesting Energy from Raindrops, Wind, and Human Motions and as Self-Powered Sensors》,闡述了磨擦納米發電機技術除了通過機械運動(如身體運動),也能利用自然源(如雨、風)和來擷取動能的織物。
該研究同樣是在王中林院士帶領下,賴盈至等人示範了結合摩擦納米發電機的智慧布料,將其做成雨衣、雨傘、旗幟、衣物等,就可以擷取大自然風、雨,以及人體運動的能量。這樣的技術可應用在物聯網,尤其是偏遠地區的物聯網應用,“最好的方式讓設備可以自給自足,不需替換它的電池”。
軟機器人應用潛力看好,但仍有改善之處
賴盈至在 2013~2014 年以訪問研究生的身份進入斯坦福大學化學工程系,在鮑哲南院士麾下學習納米碳管、軟性電子與電子皮膚,博士畢業之後,他看到王中林院士開發的摩擦納米發電機技術是人類科技新時代的能源技術,心想如果能將兩個技術結合可望克服軟性電子與電子皮膚面臨的挑戰,因此他在博士畢業進入佐治亞理工學院材料系向王中林院士學習。
“兩位老師幫助我打開了傳統的思維,”賴盈至說,“我們以前不會想到如果它可以發電,就可以拿來當感測器,有了這項技術,人類的電子與能源技術向前了一大步。如果你打破傳統的框架,就有很多機會冒出來,這是我從兩位老師身上學到的。”言談中,賴盈至流露出對兩位老師指導與帶領的感謝,珍惜與兩位院士的情誼。
在兩位著名學者的啟蒙下,現在擔任教職的他也與團隊致力利用新穎材料與新物理機制,開發納米發電機、電子皮膚、軟性電子元件、軟性機械,賴盈至認為,主動感知、回應的軟機器人可應用性很大,能察覺東西掉落,也可以控制力道,用以夾取一些容易損傷的東西,像是雞蛋、水果,另外就是與人工智慧相關演算法結合,創造更多的應用。
不過,他也直言,該技術仍有持續改善的空間,比如目前他們開發的觸診軟機器人,可以量人體脈搏、量環境溫度,例如辨識冰水或熱水,但用在量人體體溫還不行,因為人體體溫變化細微,還無法辨別很細微的差異。
另外,還有一個不足的地方,就是軟機器人的作業系統是剛性的,“目前感測器是軟的,機械本身也是軟的,但是,作業系統依舊是硬的,如電路板、傳輸信號的電路、處理器等都是硬的”,但要讓這些元件變柔性,挑戰相當大,“這不是兩三年就可以解決的問題,是很長期的目標”,不過賴盈至與團隊已經投入研究,“希望有一天軟機器人全部都是採用柔性的元件,達到極致。”
青年學者賴盈至在過去 6 年,先後以訪問研究生的身份進入斯坦福大學、佐治亞理工學院,分別師承了美國佐治亞理工學院教授、中國科學院外籍院士王中林及斯坦福大學化學工程學院院長鮑哲南,在兩位科學家的指導下跨入柔性電子與摩擦納米發電機(TENG,triboelectric nanogenerator)的研究領域。並將兩位材料領域學者的研究領域進行了更深度的融合創新,進而開發出全球第一個具有自驅動(self powered)、主動感知的軟機器人(soft robot)。
多年來在人造皮膚領域帶領開創性研究的鮑哲南教授在有次採訪中提到,如果以人的皮膚作為一個啟發點出發,或許就能夠開創出更高的創造力,而不是局限于現有電子器件的功能去思考,會從生物類比的方式思考不同的可能性,進而產生一些平常想不到的做法。而賴盈至在接受 DeepTech 採訪時也特別提到,“兩位老師幫助我打開了傳統的思維。”
基於上述“如果打破傳統的框架,就有很多機會冒出來”的理念,以及在王中林院士的帶領下,賴盈至等人利用摩擦納米發電機,開發出全球第一個自驅動,且可主動式感知、響應外部刺激和內部運動的軟機器人皮膚,實現自發電,不用電池就可感測觸摸、壓力、濕度,讓軟機器人的能力和應用範圍,又往前邁了一步。
該研究成果《Actively Perceiving and Responsive Soft Robots Enabled by Self-Powered, Highly Extensible, and Highly Sensitive Triboelectric Proximity- and Pressure-Sensing Skins》先前已經發表在國際期刊 Advanced Materials 上。
此次,DeepTech 專訪了這位青年科學家、“臺灣中興大學”材料科學與工程學系助理教授賴盈至,探討自驅動電子皮膚的優勢,以及後續可持續改善的方向。
軟機器人的挑戰:大驅動電壓、高功耗
人類通過攝像頭、傳聲器賦予了機器人視覺、聽覺,近年隨著機器學習相關演算法的躍進,這兩大領域已經有很大的進展及市場應用,機器人“觸覺”則是許多科學家也想攻克的領域。在生物體中,皮膚是最大的器官,不僅具表面保護作用,還有優異的機械屬性,如柔韌性、伸展性和順應性,可以主動感知環境資訊,包括觸覺、壓力、濕度等。全球許多研究團隊投入開發類似皮膚的感官設備—電子皮膚,讓機器能夠更自然感受人和環境,並與其互動。
提到軟機器人,大家最耳熟能詳的例子莫過於迪士尼動畫裡的“大白”,與剛性材料相比,由柔順和可伸展材料製成的軟機器人可提供更安全的應用,同時可變形的體態和類似肌肉的動作也較能適應不可預測的環境,運動的自由性相對較大,如果軟機器人又具有了觸覺,便進一步擴大了應用範圍。
不過,要開發能夠在軟機器人上工作的類皮膚感測器(skin-like sensor)難度很高,包括材質的拉伸性、靈敏度,以及需要大的驅動電壓,一般來說,柔性無源感測器,如電阻/電容/光學類型,需要連續預先設置大型驅動電壓,通常為 1~10 V 或是由光信號驅動它們運行。
此外,傳統感測器是通過電力進行驅動,機器人的體積通常不小,如果要在機器人身上大面積覆蓋電子皮膚,每個感測器驅動電壓,就會導致功率耗散高,再加上,現有的電子元件不適用於彎彎曲曲、體態變動的構造之上,因此,開發用於軟機器人的關鍵感應裝置,就必須找到其他技術來規避傳統感測器的限制,摩擦發電就成了一帖解藥。
摩擦起電效應(triboelectric effect)為一種自然現象,利用材料不同的電負性,當材料在與另一種材料接觸後,變為帶電的,在電介質表面上的摩擦電荷,通過驅動自由電子在外部電路的流動,進而產生電勢(electric potential)。與無源感測器相比,摩擦皮膚的驅動能量來自摩擦起電效應,涉及接觸電氣化和靜電感應的協作。
賴盈至表示,摩擦發電有兩種應用方法,一種是發電源來自機械力,像是用手觸摸、用手施加壓力;另一種則是自然源,利用風、雨產生能量。
應用在電子皮膚上,當你觸摸它時,會產生一個電力信號,但除了用作發電之外,他們研究的創新之處,在於將電力信號變為一個信號源,摩擦納米發電機就變成了感測器,這個可自供電的摩擦皮膚(tribo-skin)能夠感知外部刺激,像是碰觸和壓力,又具備很好的拉伸性,就算被剪破也能正常運作,同時實現了機器皮膚和軟機器人於一身。
自供電感測器三大優點
摩擦發電感測器跟傳統感測器有什麼不同?賴盈至舉例,智慧手機要有觸控功能,必須先提供觸控面板模組電力,用戶觸摸後,原本的電力信號就會改變,系統就會知道有人觸摸了它,但是使用 TENG 技術的感測器不需要事先提供電力,它自已會產生電力信號,也就是,一個可自供電的感測器。
試想一下,若要賦予機器人觸覺,必須在全身或四肢鋪滿感測器,會使機器人更加耗電,因此,摩擦發電感測器的第一個優點是解決了供電問題。
另一個好處在於材料選擇及形體運用靈活,TENG 感測器可以使用多種材料來製作,包括橡膠、矽膠、高分子、薄膜等,可以依照材料的特性做出可彎曲、可伸縮的型態,材料不受限,可應用性就寬廣很多。
第三個優勢在於成本,賴盈至指出,TENG 感測器不需使用半導體製程如熱蒸鍍金屬,而是採用低溫製程,成本會比傳統的感測器便宜許多。
電子皮膚被剪破仍正常運作,觸診、摸尿布、爬行機器人都可行
根據發表在 Advanced Materials 上的論文,他們開發的摩擦皮膚將導電基質夾在彈性體(elastomers)之間,均勻鋪覆在三角微棱鏡(triangular-microprism)壓感結構上,有很好的拉伸性(100% 拉伸應變性能),靈敏度也很高,低壓敏感度為 0.29 kPa-1(9.54 V kPa-1,<5 kPa),並且最高檢測限可達至 63 Pa。
具有最高電子親和力的橡膠是很好的摩擦電負性材料。當物體與摩擦皮膚接觸時,由於電負性的差異,電子從物體表面移動到橡膠表面。當物體離開時,兩個帶相反電荷的表面分離,產生電位差。橡膠表面上的未遮罩負電荷驅動自由電子從嵌入的銀片流到地面,並引起電極中正電荷的累積,從而產生電流和電壓輸出。
摩擦皮膚可以整體集成到軟氣動致動器(pneumatic actuator)中,使軟機器人能夠執行各種主動感知和回應任務,像是機器抓手,可以感知物體的移動,例如距離物體多近,也能夠控制舉起、放下、或是抓取的力道,並意識到貨物掉落,可以應用在工業機器人中的監視和回饋控制上。
另外,也能應用在機器手指上,感知溫濕度、檢測到細微的人類生理信號,例如他們就設計了一個機器人手指用以檢測嬰兒褲子的水分。或是與毛蟲類機器人、蛇型機器人結合,將摩擦皮膚嵌入到機器人的腹部,當機器人在爬行時,就可感知其肌肉運動,可以執行特殊任務。
該軟機器人可直接驅動光電元件,通過點亮 LED 燈做出反應,也可以進一步做成用聲音、光線、短語等方式來應答人類,讓人類與機器人之間的交互更直觀。
摩擦納米發電機又一新研究:能量收集雨衣
除了上述的軟機器人研究,不久前國際期刊 Advanced Science 刊載一篇文章《Waterproof-Fabric-Based Multifunctional Triboelectric Nanogenerator for Universally Harvesting Energy from Raindrops, Wind, and Human Motions and as Self-Powered Sensors》,闡述了磨擦納米發電機技術除了通過機械運動(如身體運動),也能利用自然源(如雨、風)和來擷取動能的織物。
該研究同樣是在王中林院士帶領下,賴盈至等人示範了結合摩擦納米發電機的智慧布料,將其做成雨衣、雨傘、旗幟、衣物等,就可以擷取大自然風、雨,以及人體運動的能量。這樣的技術可應用在物聯網,尤其是偏遠地區的物聯網應用,“最好的方式讓設備可以自給自足,不需替換它的電池”。
軟機器人應用潛力看好,但仍有改善之處
賴盈至在 2013~2014 年以訪問研究生的身份進入斯坦福大學化學工程系,在鮑哲南院士麾下學習納米碳管、軟性電子與電子皮膚,博士畢業之後,他看到王中林院士開發的摩擦納米發電機技術是人類科技新時代的能源技術,心想如果能將兩個技術結合可望克服軟性電子與電子皮膚面臨的挑戰,因此他在博士畢業進入佐治亞理工學院材料系向王中林院士學習。
“兩位老師幫助我打開了傳統的思維,”賴盈至說,“我們以前不會想到如果它可以發電,就可以拿來當感測器,有了這項技術,人類的電子與能源技術向前了一大步。如果你打破傳統的框架,就有很多機會冒出來,這是我從兩位老師身上學到的。”言談中,賴盈至流露出對兩位老師指導與帶領的感謝,珍惜與兩位院士的情誼。
在兩位著名學者的啟蒙下,現在擔任教職的他也與團隊致力利用新穎材料與新物理機制,開發納米發電機、電子皮膚、軟性電子元件、軟性機械,賴盈至認為,主動感知、回應的軟機器人可應用性很大,能察覺東西掉落,也可以控制力道,用以夾取一些容易損傷的東西,像是雞蛋、水果,另外就是與人工智慧相關演算法結合,創造更多的應用。
不過,他也直言,該技術仍有持續改善的空間,比如目前他們開發的觸診軟機器人,可以量人體脈搏、量環境溫度,例如辨識冰水或熱水,但用在量人體體溫還不行,因為人體體溫變化細微,還無法辨別很細微的差異。
另外,還有一個不足的地方,就是軟機器人的作業系統是剛性的,“目前感測器是軟的,機械本身也是軟的,但是,作業系統依舊是硬的,如電路板、傳輸信號的電路、處理器等都是硬的”,但要讓這些元件變柔性,挑戰相當大,“這不是兩三年就可以解決的問題,是很長期的目標”,不過賴盈至與團隊已經投入研究,“希望有一天軟機器人全部都是採用柔性的元件,達到極致。”

王中林(右)與賴盈至(左)(來源:賴盈至提供)
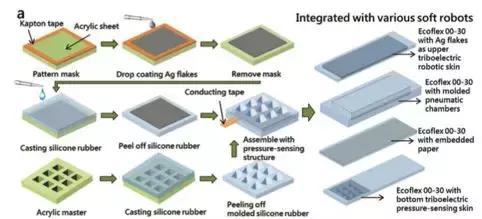
由摩擦皮膚和氣動致動器(pneumatic actuator)組成的四層結構(來源:中興大學)